

College
Frank Batten College of Engineering and Technology
Department
Electrical/Computer Engineering
Program
Biomedical Engineering
Publication Date
4-2021
DOI
10.25883/pdyb-5d91
Abstract
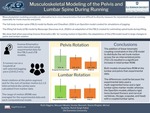
Musculoskeletal modeling provides an alternative to in-vivo characteristics that are difficult to directly measure for movements such as running, especially for trunk muscles and joints. The full-body-lumbar-spine (FBLS) model by Raabe and Chaudhari, 2016 is an OpenSim model created for simulations of jogging. The lifting full-body (LFB) model by Beaucage-Gauvreau et al., 2018 is an adaptation of the FBLS created for estimating spinal loads during lifting. PURPOSE: Determine validity of the FBLS and LFB models in simulating pelvis and lumbar spine kinematics during running. METHODS: Inverse Kinematics were executed using experimental data for the FBLS and LFB models. To obtain the 3D motion data, 5 runners ran on a treadmill at self-selected jogging pace (2.6±0.2 m/s). Axial rotations at the pelvis segment and for the sum of lumbar motion (L1-L5 intervertebral disc joints) were calculated from marker data, and the range of motion (ROM) averaged for the experimental data and each computational model. RESULTS: FBLS and LFB models had the same relative movement patterns as the experimental data. However, the ROM for both models differed from the human data. For the experimental data, the average ROM was 33.6 ± 15.6° for total lumbar rotation and 24.7 ± 12.3° at the pelvis. The ROM for the pelvis was 17.97±6.87° and 19.22±7.63° for the LFB and FBLS models, respectively. The lumbar ROM was 29.53±5.46° and 18.39±10.56° for the LFB and FBLS models, respectively. The differences in ROM could be because the experimental data used a multi-segmented torso and a rigid lumbar spine marker model, whereas the OpenSim models utilized a rigid torso (lumped thoracic and cervical vertebrae, ribcage, scapulae, and head) with a coupled lumbar spine. The average maximum RMS across all participants was 0.05 ± 0.004 cm for both LFB and FBLS models. CONCLUSION: The LFB model was created for lifting simulations but provides a better simulation of running motion at the lumbar and pelvis than the FBLS model, potentially due to the LFB model having a 3-DOF joint at T12/L1 and linear kinematic coupling constraints to distribute the net trunk motion across the six intervertebral joints (T12-L5). The ROM differences at the L5/S1 could potentially be corrected with a multi-segmented torso model. Both models have potential for simulating axial rotation of the pelvis and lumbar spine during running.
Keywords
Musculoskeletal modeling, OpenSim, Running mechanics, Spine biomechanics
Disciplines
Biomechanics | Biomechanics and Biotransport | Musculoskeletal System
Files
Download Full Text (450 KB)
Recommended Citation
Higgins, Ruth; Moeini, Maryam; Bennett, Hunter; and Ringleb, Stacie, "Musculoskeletal Modeling of the Pelvis and Lumbar Spine During Running" (2021). College of Engineering & Technology (Batten) Posters. 2.
https://digitalcommons.odu.edu/gradposters2021_engineering/2
Included in
Biomechanics Commons, Biomechanics and Biotransport Commons, Musculoskeletal System Commons